Die Zeit rennt, das merkt man immer schön an solchen Jubiläen. Heute feiern wir hier 20 Jahre Elektronisches Stabilitäts-Programm, kurz ESP.
Im März 1995 wurde erstmals serienmässig ein System in einem Serienautomobil verbaut welches alleinig zur Aufgabe hatte, die Stabilität des Fahrzeugs unter allen Umständen zu gewährleisten, den Fahrer also zu unterstützen wenn es (wieder) einmal zu einer brenzligen Situation kam.

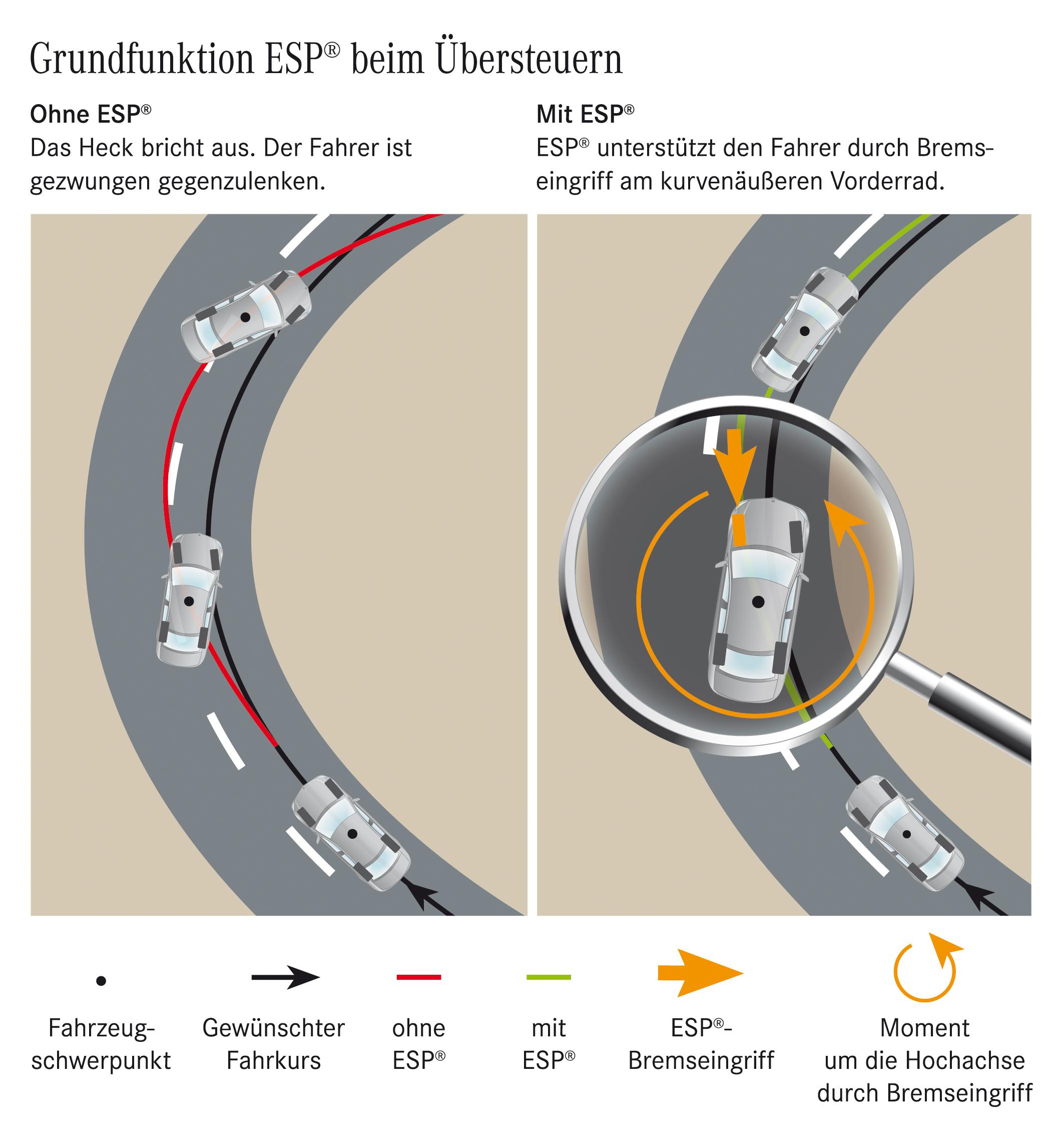
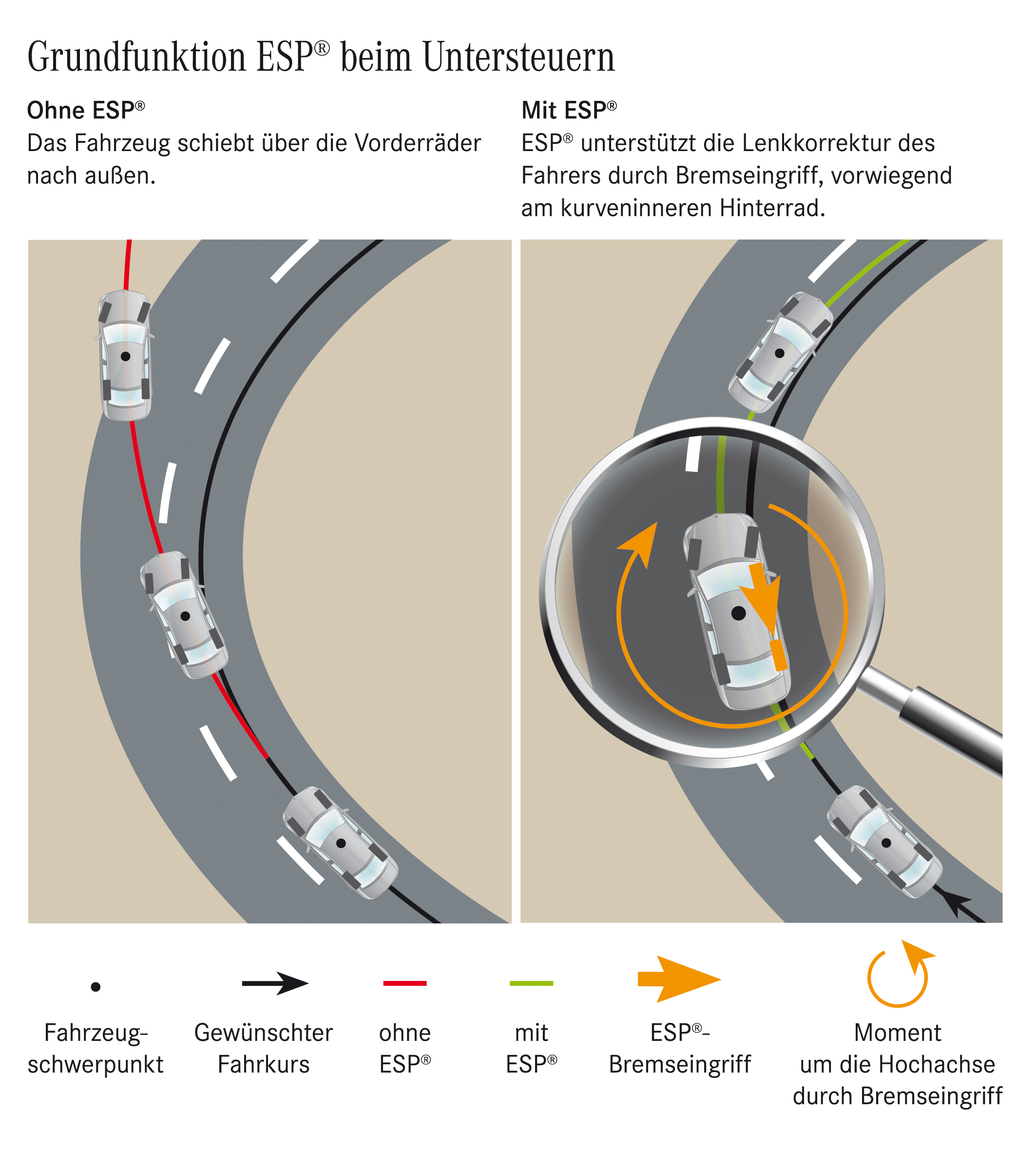
Jeder hat es sicher schon einmal selbst erlebt: man befährt eine trockene Landstraße und dann in der Kurve, im Waldstück, plötzlich Feuchtigkeit (oder auch nasses Laub, Raureif oder dergleichen – es gibt genug Möglichkeiten einer vergleichbaren Gefahr) und sofortiger Gripverlust. Dies kann dann in Form eines Übersteuerns oder eines Untersteuerns ablaufen.
Kleine Anekdote an dieser Stelle: Rallye-Ass Walter Röhrl wird in solchen Fällen immer gerne zitiert: „Übersteuern ist, wenn mein Beifahrer Angst hat. Untersteuern, wenn ich Angst habe!“
Dazu muss man sagen, dass Röhrl am liebsten Fahrzeuge mit Heckantrieb bzw. Allradantrieb bewegt!
Der erste Wagen der Welt mit ESP war das große Coupé der BR 140, genauer gesagt der S 600 Coupé – so etwas wie die Speerspitze des damaligen PKW-Programms von Daimler-Benz.


Doch was ist ESP überhaupt? Es baut auf den bekannten Systemen ABS (mehr zur Geschichte hier) und ASR auf, ist somit nur eine logische Erweiterung.
Bereits in den 1950er und 1960er Jahren haben einige Tüftler an einem „Anti-Schleuder-Schutz“ bzw. an einem Anti-Blockier-Schutz für Fahrzeuge gearbeitet. Der erste Wagen mit einem Vorläufer von ABS und ASR (auf rein mechanischer Basis) war der Jensen FF, ein britischer Sportwagen.
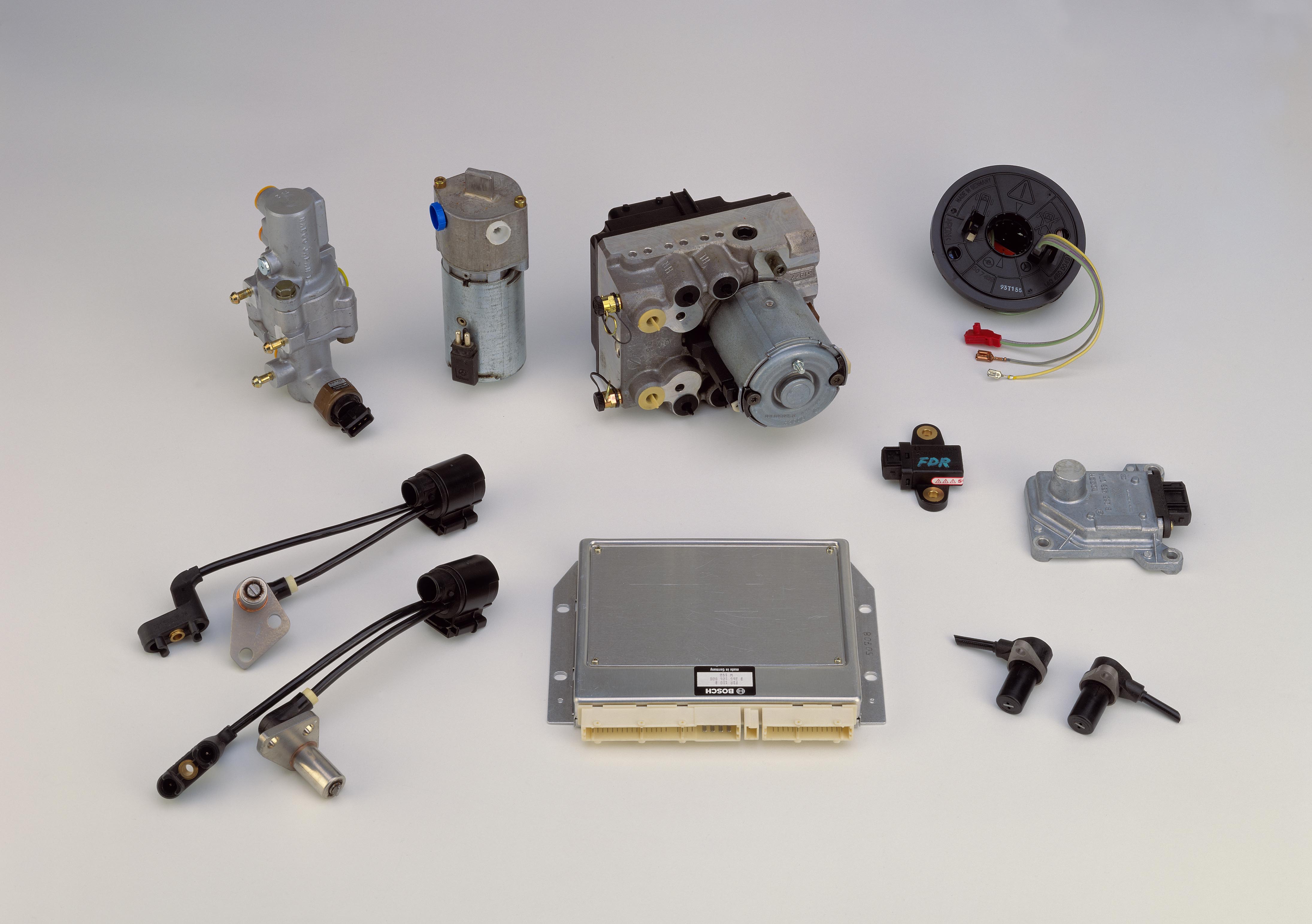 Doch erst zusätzliche Sensoren machen aus einem ASR II (welches bei Mercedes seit Ende 1989 zunächst für die V8-Modelle und später für die 6-Zylinder Modelle als SA geliefert wurde) auch ein solches Stabilitäts-Programm. Da wären der Lenkwinkelsensor der den Richtungswunsch des Fahrers erkennt, der Querbeschleunigungssensor der in der Lage ist zu erkennen ob der Wagen seitlich wegrutscht und ein so genannter Gierwinkelsensor der eine Drehung des Wagens um die Hochachse zu erfassen.
Doch erst zusätzliche Sensoren machen aus einem ASR II (welches bei Mercedes seit Ende 1989 zunächst für die V8-Modelle und später für die 6-Zylinder Modelle als SA geliefert wurde) auch ein solches Stabilitäts-Programm. Da wären der Lenkwinkelsensor der den Richtungswunsch des Fahrers erkennt, der Querbeschleunigungssensor der in der Lage ist zu erkennen ob der Wagen seitlich wegrutscht und ein so genannter Gierwinkelsensor der eine Drehung des Wagens um die Hochachse zu erfassen.
Das klingt zunächst alles einmal nach Rocket-Science, wie es so schön in der Automobil-Entwicklung genannt wird, wenn ein Prozess nicht von allen Beteiligten so gleich verstanden wird, oder aber etwas so weit entfernt von der Realität ist, dass es nur der Erdenker auch wirklich von Anfang an zur Gänze erfasst!

Zur genauen Entstehungsgeschichte bedienen wir uns heute einem kleinen Interview welches uns von Mercedes zur Verfügung gestellt wurde:
Herr Mohn, Auslöser für die Erfindung von ESP war ein Unfall in Schweden. Aber nicht jener, an den jetzt alle denken…
Mohn (lacht): Genau, ich habe sogar noch alle Unterlagen der damaligen Spesenabrechnung aufbewahrt. Sehen Sie: „Bergungshilfe“ hieß das damals,
485 schwedische Kronen kostete die Abschleppaktion. Auf dem Weg zu Testfahrten in Nordschweden bin ich am 29. Januar 1989 im Graben gelandet. Nachts war es sehr kalt gewesen, dann schien die Sonne, und entsprechend spiegelglatt war mittags die Straße. Ich war in einem 124er Mercedes 300 E-24 unterwegs, spielte mit dem Gas, das Heck brach aus und irgendwann steckten wir in einem Schneewall in der Nähe von Strömsund fest. Natürlich passierte das auch noch an einer Stelle, an der das gesamte Testteam meinen Ausritt mitbekommen musste…
War das nicht peinlich als junger Ingenieur?
Mohn: So sehr, dass ich die nächsten Nächte nicht schlafen konnte, sondern gegrübelt habe, wie sich so etwas vermeiden ließe. Offenbar waren die Seitenführungskräfte vorne zu groß und hinten zu klein gewesen.
Das war sozusagen die Geburtsstunde von ESP?
Mohn: Ja. So kam ich auf eine Zwangsbremsung als Stabilisierungsidee.
Wie ging es weiter?
Mohn: Meinen damaligen Hauptabteilungsleiter Professor Adam Zomotor konnte ich von der Vision überzeugen. Im April 1989 übernahm ich eine neue Aufgabe, die Verifikation von Fahrzeugmodellen, bekam mit Thomas Wohland einen jungen Ingenieur als Mitarbeiter – und wir haben die Idee inoffiziell weiterverfolgt. Zunächst haben wir ein mathematisches Modell zur Momentenberechnung entwickelt, mit dem wir die drei Fahrzustände übersteuernd, neutral und untersteuernd darstellen konnten.
Ganz ohne Hardware wird es aber nicht gegangen sein?
Mohn: Nein, die nötigen Bauteile haben wir uns bei Kollegen auf dem kurzen Dienstweg besorgt… (schmunzelt). Sie dürfen auch nicht vergessen: ABS ist damals noch mit zwei Drehzahlfühlern vorne und einem hinten ausgekommen. Wir brauchten die Sensorik aber an beiden Hinterrädern und haben das eben entsprechend zusammengebastelt. Später ging es um die Drehung um die Fahrzeug-Hochachse – da brachte uns ein Gyrosensor aus einem Modellbau-Helikopter auf die richtige Idee… Schließlich waren wir irgendwann im Winter 1990 soweit und hatten ein funktionsfähiges Fahrzeug aufgebaut. An Bord war eine ampelähnliche Anzeige mit drei Lämpchen, je nach Fahrzustand blinkte die entsprechende Lampe auf.
Nach zwei Jahren Undercover-Vorentwicklung war im Frühjahr 1991 dann Showdown?
Mohn: Ja, auf einer Leistungsschau der Entwickler in Arjeplog/Schweden durften wir unseren Prototypen, einen unauffälligen mausgrauen 124er, vorführen. Mit bei den Testfahrten war ein Kollege aus der Getriebeentwicklung, der als sehr vorsichtiger und eher langsamer Fahrer galt. Mit unserem selbststabilisierenden Fahrzeug zog er auf einmal nahezu genauso zügig um den gefrorenen See wie die anderen – seine Begeisterung hat wohl auch dazu beigetragen, dass dann die Serienentwicklung losging…
Zusammen mit Bosch?
Mohn: Ja, 1992 startete die Serienentwicklung. Über 40 Ingenieure von Mercedes-Benz und Bosch, darunter mit Anton van Zanten ein weiterer Vater des ESP, arbeiteten an dem Projekt und bauten im Wettstreit Autos auf. Ich bin damals aber in der Vorentwicklung geblieben.
1995 kam dann der Mercedes S 600 als erstes Modell mit serienmäßigem ESP auf den Markt. Ist heute, 20 Jahre später, das Thema ESP ausgereizt?
Mohn: Nein, die Weiterentwicklung über die Jahre war rasant und stoppt auch jetzt nicht. Ich denke: Der Zug hat gerade erst Fahrt aufgenommen. Es gibt noch so viele Möglichkeiten: von der Vernetzung mit anderen Sicherheitssystemen, wie wir das heute schon mit „Intelligent Drive“ machen, bis hin zur Kopplung mit den Informationen aus anderen Autos bei der Car-to-x-Technologie…
Frank-Werner Mohn darf also durchaus als einer der Erfinder des ESP bezeichnet werden!
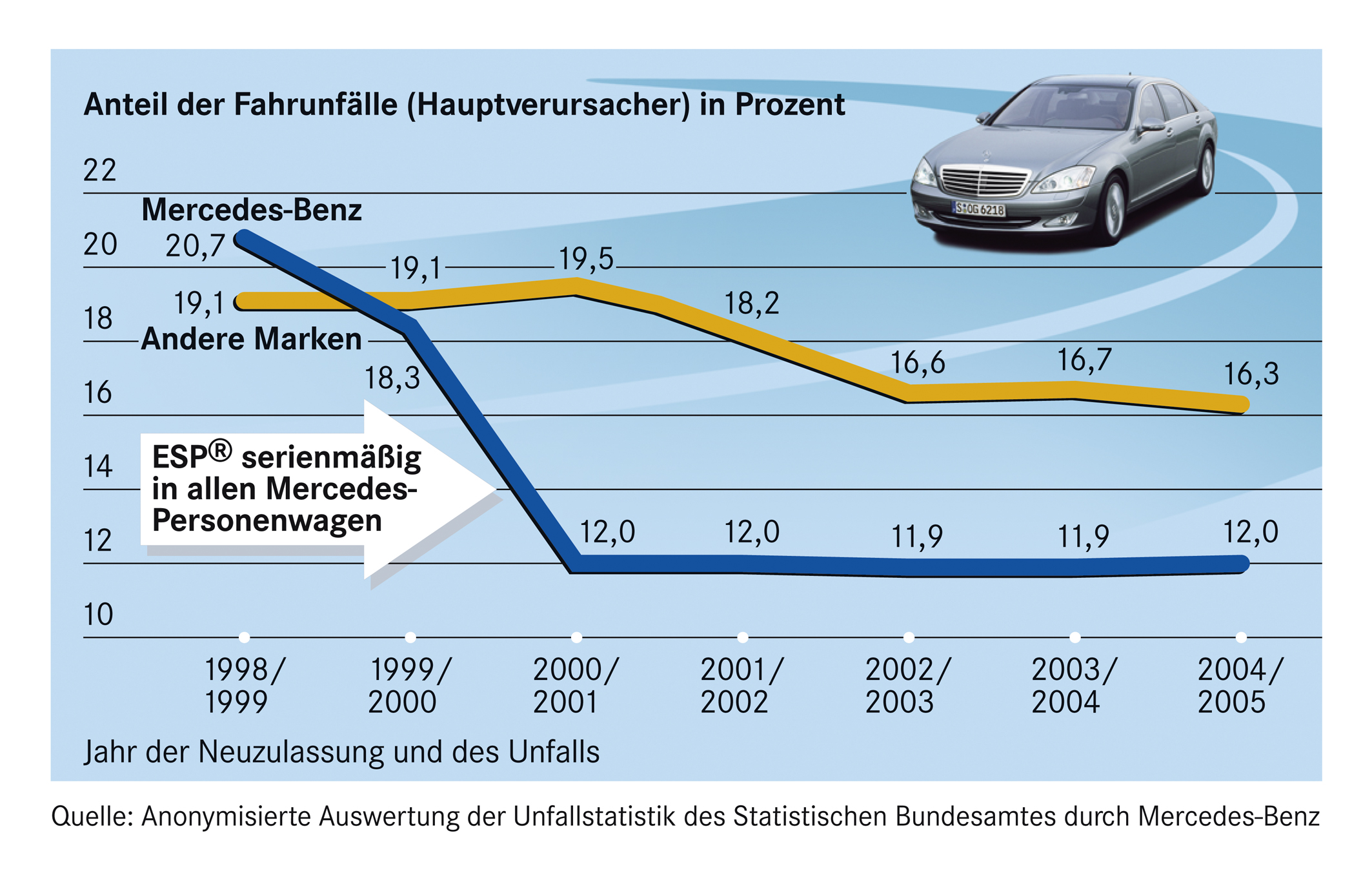
 Seinen Siegeszug im Automobil verdankt ESP aber letztendlich einem Umstand, weswegen der neue kleine A-Klasse Mercedes der BR 168 fortan auch liebevoll als „Elch“ bezeichnet wurde. Am 21. Oktober 1997 kippte ein Pressetestwagen in Schweden bei Ausweichmanövertests von Journalisten um. Mercedes regierte seinerzeit vorbildmässig und stoppte die Produktion und Auslieferung des Fahrzeugs und besserte nach. Noch vor der C- und E-Klasse erhalten fortan ab Anfang 1998 sämtliche A-Klasse Modelle serienmässig ESP. Der Rest ist Geschichte!
Seinen Siegeszug im Automobil verdankt ESP aber letztendlich einem Umstand, weswegen der neue kleine A-Klasse Mercedes der BR 168 fortan auch liebevoll als „Elch“ bezeichnet wurde. Am 21. Oktober 1997 kippte ein Pressetestwagen in Schweden bei Ausweichmanövertests von Journalisten um. Mercedes regierte seinerzeit vorbildmässig und stoppte die Produktion und Auslieferung des Fahrzeugs und besserte nach. Noch vor der C- und E-Klasse erhalten fortan ab Anfang 1998 sämtliche A-Klasse Modelle serienmässig ESP. Der Rest ist Geschichte!
Der Vorteil von ESP liegt auf der Hand, was auch folgende Grafik verdeutlicht:
Nach einer Verordnung des europäischen Parlaments und des Rates vom 13. Juli 2009 müssen seit November 2011 alle in der EU neu zugelassenen PKW- und leichte Nutzfahrzeug-Modelle serienmässig mit ESP ausgestattet werden.
Doch ESP wurde auch ständig weiterentwickelt, gab es anfänglich oftmals noch Klagen von ambitionierteren Autofahrern, das System würde ihnen den Fahrspaß nehmen und oftmals grundlos den Wagen abbremsen oder die Gasannahme verweigern, so ist das System bei Mercedes heute so gut kalibriert, dass man es auch als sportlich ambitionierter Autofahrer so gut wie nie merkt (außer man provoziert es auf winterlich glatter Straße um dann sogleich wieder von Geisterhand sicher eingefangen zu werden).
Eine höhere Rechenleistung der Steuergeräte und ein schnellerer und feiner dosierter Aufbau des Bremsdrucks, kompaktere Komponenten und neue Algorithmen drucken einiges zur Verbesserung des Systems im Laufe der zwei Jahrzehnte bei.
Also wohl wichtigster Meilenstein kann man hier die Einführung der elektrischen Servolenkungen anmerken, so kann seit 2005 auch ein kurskorrigierender Lenkeingriff zur Stabilisierung des Fahrzeugs beitragen.
Folgende Systeme greifen in einem modernen Mercedes auf das Elektronische Stabilitäts-Programm bzw. dessen Komponenten zurück:
- ADAPTIVE BRAKE: erweitert die Funktionen des ESP um eine komfortable Berganfahrhilfe und die HOLD-Funktion, die im Stillstand ungewolltes Vor- oder Zurückrollen automatisch verhindert.
- Aktiver Spurhalte-Assistent: korrigiert bei unbeabsichtigtem Spurwechsel beim Überfahren von durchgezogenen Linien und bei erkannter Kollisionsgefahr durch belegte Nachbarspur auch beim Überfahren unterbrochener Linien mit einem einseitigen Bremseingriff über ESP die Spur.
- Aktiver Totwinkel-Assistent: kann im letzten Moment durch einseitigen Bremseingriff dazu beitragen, eine drohende seitliche Kollision abzuwenden oder die Unfallschwere zu reduzieren.
- Anhängerstabilisierung: dämpft bei Bedarf die Pendelschwingung aktiv mit Hilfe radindividueller, wechselseitiger Bremseingriffe an der Vorderachse bzw. verlangsamt das Zugfahrzeug bei kritischer Geschwindigkeit.
- Bergabfahrhilfe DSR (Downhill Speed Regulation): Bei anspruchsvollen Bergab-Passagen kann eine langsame, manuell einstellbare Fahrgeschwindigkeit eingehalten werden. Dies geschieht mit Hilfe der Motor- und Getriebesteuerung sowie gezielten Bremseingriffen.
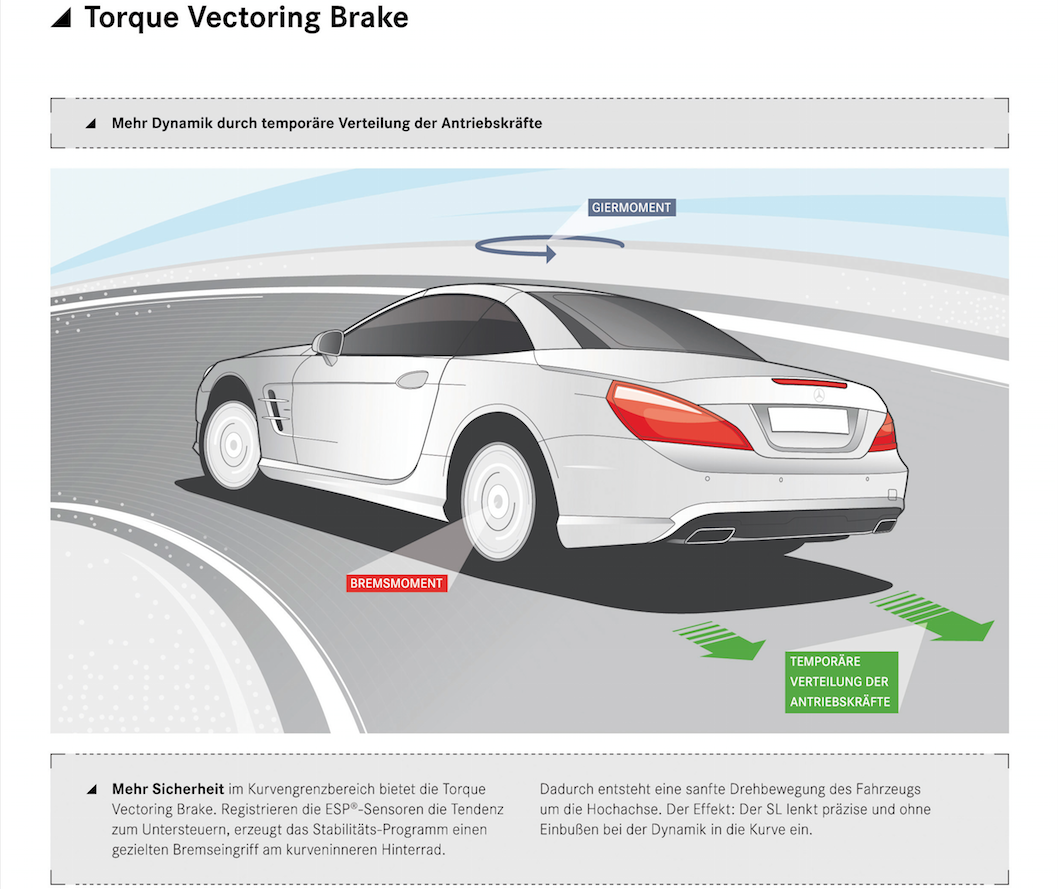
- Kurvendynamik-Assistent: Registrieren die ESP Sensoren die Tendenz zum Untersteuern, erzeugt das Stabilitätsprogramm einen gezielten Bremseingriff am kurveninneren Hinterrad. Dadurch entsteht eine sanfte Drehbewegung des Fahrzeugs um die Hochachse.
- Seitenwind-Assistent: kann Spurabweichung über einseitigen ESP Eingriff kompensieren (bei Fahrzeugen ohne Active Body Control).